外部センサーの使用
カメラトラッキング方法に外部センサーを使用するときは、以下の手順で設定を行います。
注意
- 外部センサーの使用方法については、外部センサーの使用説明書を参照してください。
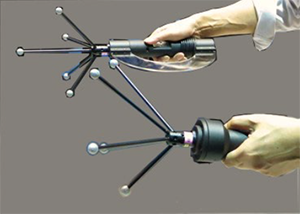
- 外部センサーを使用したカメラトラッキング方法では、MREAL Displayに別売の「MREAL 光学式センサアタッチメント」(アタッチメント)の取り付けが必要です。詳しくはMREAL Displayの使用説明書を参照してください。
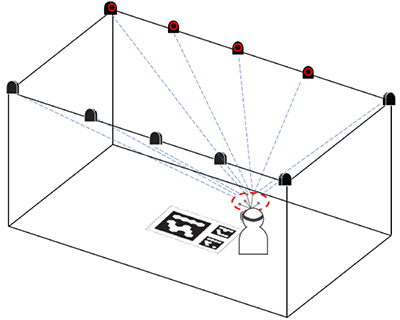
概要
MREAL Displayに取り付けたアタッチメント(別売)を、VICON、OptiTrackまたはVRPN対応の光学センサーでトラッキングします。空間特徴やマーカーよりも高精度のMREAL体験が可能です。
VICON、OptiTrackを使用する場合
-
MREAL Configuration Tool画面で[ベース設定]を選ぶ
-
[1. カメラデバイスの選択]で[MREAL Display]を選ぶ
-
[3. カメラトラッキング方法の選択]の[指標を使用したトラッキング]で[使用しない]を選ぶ
-
[センサーを利用したトラッキング]で、[VICON]または[OptiTrack]を選ぶ
-
[接続設定]をクリックする
- 外部センサーに対応した[センサー接続設定]画面が表示されます。
-
設定項目を入力する
VICON

- [ホスト名]に、外部センサーのシステムがインストールされたパソコンのホスト名、またはIPアドレスを入力します。
- [ステーションID]で、トラッカー名に設定したステーションIDを選び、[OK]をクリックします。
OptiTrack

-
外部センサーのキャリブレーションを実行する
- 「外部センサーのキャリブレーション」を参照してください。
VRPN対応センサーを使用する場合
-
[センサーを利用したトラッキング]で[VRPN]を選び、[接続設定]をクリックする
- [センサー接続設定]画面が表示されます。

-
ホスト名とポート番号を入力する
- [ホスト名]には、VRPN対応センサー用ソフトウェアがインストールされたパソコンのホスト名、またはIPアドレスを入力します。
- [ポート番号]には、指定されたポート番号を入力します。
-
[トラッカーリスト]で[VRPN_Tracker]を選び、[編集]をクリックする
- [トラッカーの編集]画面が表示されます。

-
[トラッカー名]と[ステーション数]を入力して、[OK]をクリックする

-
[センサー接続設定]画面の[カメラトラッキング設定]で、トラッカー名に設定したステーションIDを選び、[OK]をクリックする
-
MREAL Configuration Tool画面の[詳細設定]をクリックする
- [VRPN]タブで、[トラッカー位置入力の単位]と[座標系単位]の項目を選びます。詳しくは使用するVRPN対応センサーの使用説明書などを参照してください。
-
センサーのキャリブレーションを実行する
- 「外部センサーのキャリブレーション」を参照してください。
OptiTrackの設定
カメラトラッキング方法の外部センサーにOptiTrackを使用する場合は、センサー接続設定画面での入力内容が、Motive: Tracker(OptiTrackシステムの基盤ソフトウェア)の設定により異なります。
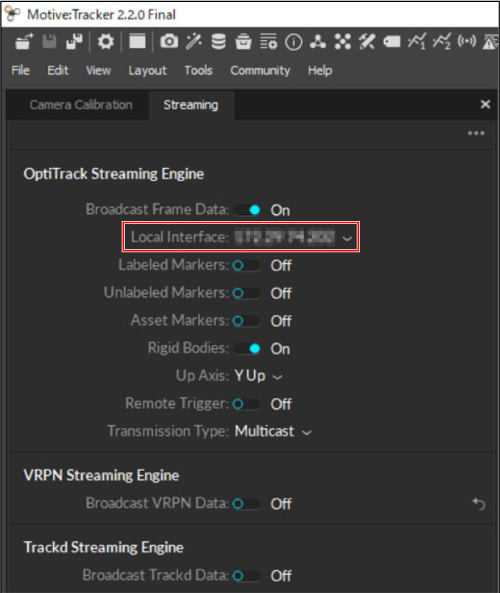
| [Local Interface]の設定 | [サーバーホスト名/IPアドレス]に入力する内容 | [自PCホスト名/IPアドレス]に入力する内容 |
|---|---|---|
| Loopback | localhost | localhost |
| OptiTrackシステムが導入されたパソコンのIPアドレス | OptiTrackシステムが導入されたパソコンのIPアドレス | MREAL PlatformがインストールされたパソコンのIPアドレス |
参考
- Motive: Tracker および[Local Interface]の設定について、詳しくは販売店にお問い合わせください。
外部センサーのキャリブレーション
-
[3. カメラトラッキング方法]の[センサーのキャリブレーション]で[ツール起動]をクリックする
- 6DOF Sensor Toolが起動します。
-
外部センサーでデフォルトマーカーを撮影する
- デフォルトマーカーを6DOF Sensor Tool画面内に収め、[キャプチャー]をクリックして撮影します。
-
[表示]横の[
 ]アイコンをクリックすると、画像の表示エリアが全画面で表示されます。パソコンの[Esc]キーを押すと元の大きさに戻ります。
]アイコンをクリックすると、画像の表示エリアが全画面で表示されます。パソコンの[Esc]キーを押すと元の大きさに戻ります。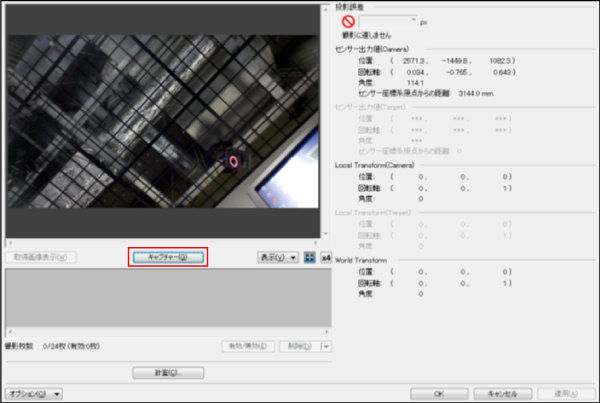
-
以下を参照に、異なる方向から10枚以上撮影します。

-
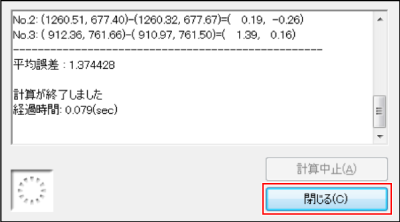
[計算]をクリックする
- 画像表示エリアを全画面で表示しているときは、パソコンの[Esc]キーを押して画像表示エリアを元の大きさに戻します。
-
以下の画面が表示されたら、[閉じる]をクリックする
-
6DOF Sensor Tool画面で、[適用]をクリックしてから[OK]をクリックする
-
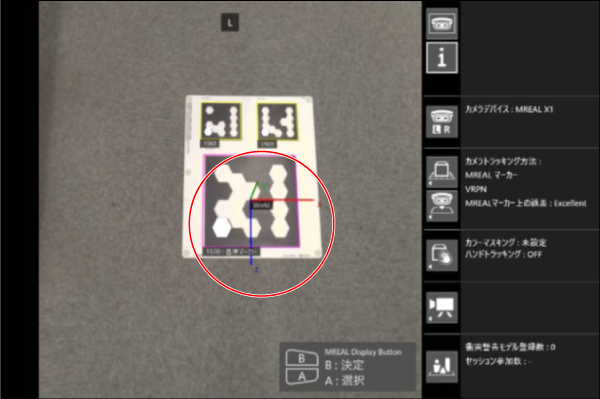
キャリブレーション結果を確認する
- キャリブレーション正常に終了すると、Preview Tool画面のデフォルトマーカー上に、世界座標系を示す三軸図が表示されます。
センサーを利用したターゲットの登録
外部センサーを使用してトラッキングするときは、センサーを利用したターゲットを使用することができます。
準備
- 操作するモックアップなどに、光学式センサー用の反射マーカーを取り付けます。
- VICONを使用してトラッキングするときは、反射マーカーの組み合わせの名称を「MRStation001」~「MRStation016」としてVICONのシステムに登録しておきます。なお、登録した名称の末尾の数字(001~016)が、「ステーションID」になります。
- OptiTrackを使用してトラッキングするときは、反射マーカーの組み合わせをOptiTrackのシステムに登録しておきます。なお、反射マーカーの組み合わせに割り振られているIDが、「ステーションID」になります。
ターゲットの登録
-
MREAL Configuration Tool画面の[オプション設定]で[ターゲット]を選ぶ
-
[ターゲットの一覧]で[追加]を選ぶ
-
[1. 情報入力]で、登録するターゲットのID番号を選び、ターゲット名を入力する
-
[2. トラッキング方法の選択]の[センサーを利用したトラッキング]で[ON]を選ぶ
-
[3. 座標系のキャリブレーション]/[2. センサーを利用したトラッキング]の[ステーションID]で、VICONまたはOptiTrackのシステムに登録したステーションIDを選ぶ
ターゲットに重ねる3DCGの調整
[ターゲット座標系の移動と回転]で[ツール起動]をクリックして、Model Alignment Toolを起動します。
Model Alignment Toolでの3DCGの調整については、「3DCGの姿勢を調整する」を参照してください()。