ベース設定の詳細設定
- 視線カメラの調整([視線カメラ]タブ)
- 位置合わせカメラの調整([位置合わせカメラ]タブ)
- 外部センサーの調整([センサー]タブ)
- MREAL映像の調整([表示]タブ)
- 登録マップの設定([空間特徴]タブ)
- 世界座標系の調整([座標系]タブ)
[ベース設定]を選び、[詳細設定]をクリックすると、設定タブが表示されます。設定タブを切り換えて、MREAL DisplayやMREAL空間などの詳細な設定を行います。
参考
- [ベース設定]の内容によって、表示されない設定タブがあります。
視線カメラの調整([視線カメラ]タブ)
ホワイトバランス

照明光の影響などで、現実映像の白い物体が白く写っていないときは、本機能を使用してホワイトバランスの調整を行います。
MREAL S1/X1では、[自動で設定]を選ぶと、ホワイトバランスが自動調整されます。
色温度で調整するときは、スライダーを動かします。調整結果はプレビュー画面で確認できます。
[カメラ映像を使用した設定]が表示される機種では、以下の手順で白基準を使用したホワイトバランス調整ができます(MREAL Display MD-10/20)。
-
MREAL空間内に白い用紙(白基準)を置く
-
[ツール起動]をクリックする
-
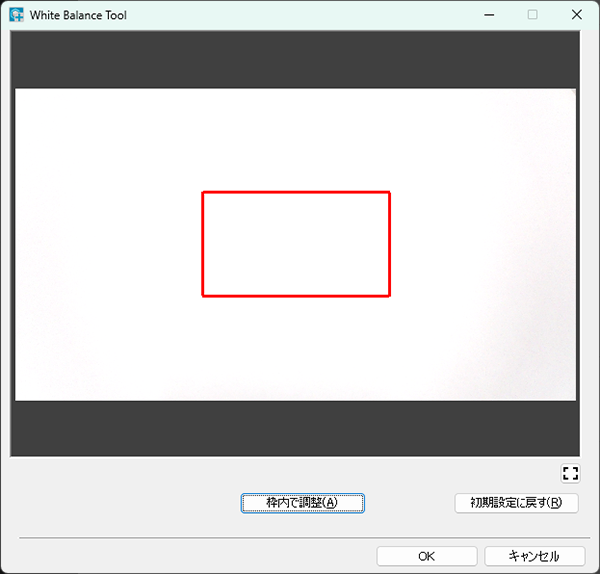
White Balance Toolが起動して、以下の画面が表示されます。
-
-
白基準が赤枠内に入るようにする
-
[枠内で調整]をクリックする
-
[OK]をクリックする
露出

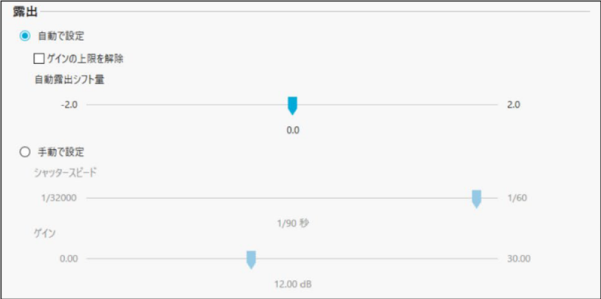
- 明るさを自動設定する場合は、[自動で設定]を選びます。[自動露出シフト量]のスライダーを動かすと、自動設定状態での露出補正が行われます。
- 手動で設定する場合は、[手動で設定]を選び、[シャッタースピード]と[ゲイン]のスライダーで調整します。
- [ゲインの上限を解除]が表示される機種(MD-10、MD-20)では、チェックを入れると、ゲインの補正値の上限が30.00dBまで有効になり、0~30.00dBの範囲で自動設定が行われます。
- 調整結果はプレビュー画面で確認できます。
位置合わせカメラの調整([位置合わせカメラ]タブ)
露出
MREAL Displayの位置合わせカメラ映像の明るさを調整します。
- 明るさを自動設定する場合は、[自動で設定]を選びます。
- [ゲインの上限を解除]が表示される機種では、チェックを入れると、ゲインの補正値の上限が30.00dBまで有効になり、0~30.00dBの範囲で自動設定が行われます。
- MD-20では、[自動露出シフト量]のスライダーを動かすと、自動設定状態での露出補正が行われます。
- 手動で設定する場合は、[手動で設定]を選び、[シャッタースピード]と[ゲイン]のスライダーで調整します。調整結果はプレビュー画面で確認できます。
カメラトラッキングの精度を向上させる
MREAL X1、MREAL S1、MREAL Display MD-20、RealSenseでは、[露出]の項目を調整することで、カメラトラッキングの精度が向上する場合があります。
-
Preview Tool画面の[
 ]をクリックして、位置合わせカメラの画像を表示させる
]をクリックして、位置合わせカメラの画像を表示させる
- MREAL映像に特徴点などの情報が多数表示されるように、MREAL Displayをゆっくり動かします。
-
[手動で設定]を選ぶ

-
スライダーを調整する
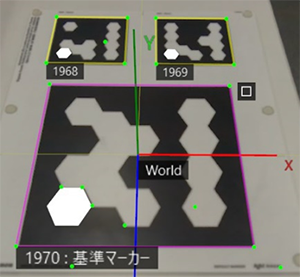
- [シャッタースピード]では、Preview Tool画面に特徴点(緑または青の点)が多く表示されるようにします。
- [ゲイン]では、画像の明るさを適切にします。
- 設定が終了したら[OK]をクリックします。
外部センサーの調整([センサー]タブ)

トラッキングセンサー遅延設定
カメラトラッキング方法に外部センサーを使用するときに表示されます。3DCGがブレたり、追従しないときなどに、外部センサーからの信号遅延を調整します。映像の動きに対して3DCGが遅れて表示されるときは、スライダーを+方向に動かします。3DCGが早く表示されるときは、スライダーを-方向に動かします。
MREAL映像の調整([表示]タブ)

表示位置とサイズ
MREAL映像が表示される領域のサイズと位置を調整します。[自動で設定]のチェックを外すと調整できます。
立体視調整
立体映像が実寸よりも大きく/小さく見えるように感じる場合は、MREAL映像のサイズと位置を調整します。
-
[有効]にチェックを入れて[編集]をクリックする
-
Image Setting Toolが起動して、以下の画面が表示されます。

-
-
スライダーを動かして調整する
- [表示位置]では、左目側と右目側の映像の間隔を調整することができます。
- [拡大・縮小]では、MREAL映像の大きさを調整することができます。
- 調整前の状態に戻すときは[リセット]をクリックします。
- 調整が完了したら[OK]をクリックします。
表示パネル設定
[遅延低減モード]にチェックを入れると、映像表示の遅れが緩和されます。
[残像低減モード]にチェックを入れると、残像による映像のボケが軽減されます。
[ビデオスムージングモード]にチェックを入れると、MREAL映像のコマ落ちが軽減されます。
注意
- コマ落ちが著しいときは、[ビデオスムージングモード]のチェックを外して、使用環境を確認してください。
- [ビデオスムージングモード]は、外部モニター出力に影響を及ぼしません。
輝度設定
使用場所の照明や外光環境などに応じて、MREAL映像の輝度を調整します。
モニター出力設定
外部モニター(Full HD(1920×1080)、またはWQXGA(2560×1600))への出力設定を行います。
その他
OpenXR対応アプリケーション使用時は、必要に応じて以下を設定します。
背景画像とCGの遅延低減設定
背景画像に対して3DCGの動きに遅延が目立つ場合は、[アプリケーションの遅延を低減する]にチェックを入れます。
背景画像と合成するCGの透明度設定
背景画像とCGの透明度の関係が不自然な場合は、[透明度を反転する]にチェックを入れます。
マーカーキャンセラ-
MREAL空間内で外部モニターを使用する場合は、[表示する]にチェックを入れます。外部モニターに表示されたマーカーを、MREAL Displayが誤検出することを防ぎます。
参考
- 機種により表示されるメニューや項目が異なります。
登録マップの設定([空間特徴]タブ)

カメラトラッキング方法に空間特徴を使用するときに表示されます。[登録マップ情報]では、空間特徴でのカメラトラッキング用の登録マップを作成・登録することができます。詳しくは「登録マップの作成」を参照してください。
世界座標系の調整([座標系]タブ)

世界座標系における重力方向
重力方向(下方向)を指定します。
世界座標系の原点をトラッキングセンサーの原点に合わせる
カメラトラッキング方法に外部センサーを使用するときに、世界座標系の原点と外部センサー座標系の原点を合致させます。