サーボAF特性
撮影する被写体や撮影シーンに適したサーボAF撮影を簡単に行うことができます。
Case オート
撮影する被写体や撮影シーンに適したサーボAFの特性(被写体追従特性、速度変化に対する追従性)を設定できます。
-
[
 :Case オート]を選ぶ
:Case オート]を選ぶ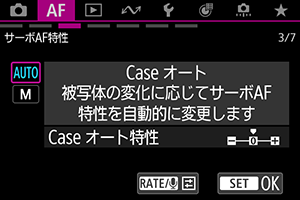
-
 を回して[AUTO]を選び、
を回して[AUTO]を選び、 を押します。
を押します。 -
Case オートに設定され、[AUTO]が青色で表示されます。
-
-
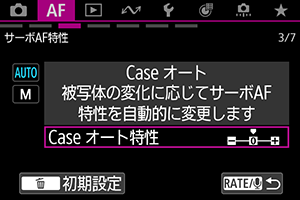
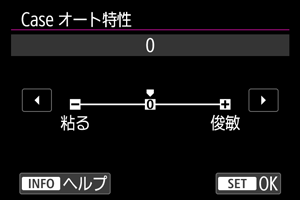
[Case オート特性]を調整する
-
 /
/ ボタンを押します。項目に紫色の枠が付きます。
ボタンを押します。項目に紫色の枠が付きます。
-
を押して[Case オート特性]を選びます。
-
または
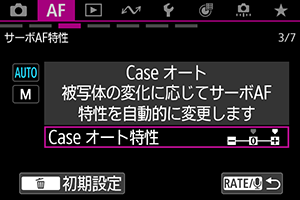
 で調整値を選びます。
で調整値を選びます。 -
初期設定は[
 ]の薄い灰色で表示されます。
]の薄い灰色で表示されます。 -
設定が終了したら
を押します。
-
/ボタンを押すと、手順1の状態に戻ります。
-
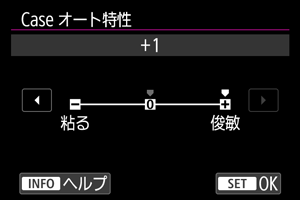
Case オート特性
Caseオートの設定を変更することで、初期設定よりピントが合いやすくなることがあります。
-
0
標準的な設定です。幅広いシーンに対応できるため、通常はこちらの設定をおすすめします。
-
粘る:–1
被写体の手前に一瞬障害物が入り込むときや、被写体の動きが激しくAFフレームから外れやすいときでも、狙っている被写体にできるだけピントを合わせ続けます。
-
俊敏:+1
多数の被写体を次々に撮影したいときなどに、ピント合わせの対象の乗り換えがしやすくなります。
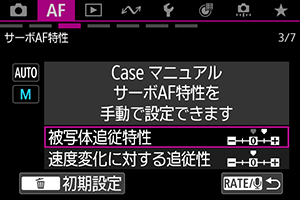
Case マニュアル
撮影条件に応じて、サーボAFの特性を任意に調整することができます。
-
[
:Case マニュアル]を選ぶ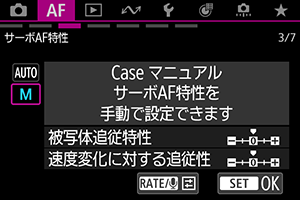
-
を回して[M]を選び、を押します。
-
Case マニュアルに設定され、[M]が青色で表示されます。
-
-
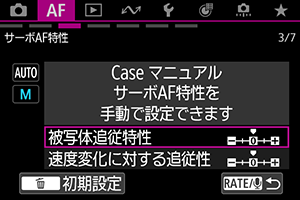
[Case マニュアル]の特性を調整する
-
/ボタンを押します。項目に紫色の枠が付きます。
-
または
 で調整したい項目を選び、を押します。
で調整したい項目を選び、を押します。
-
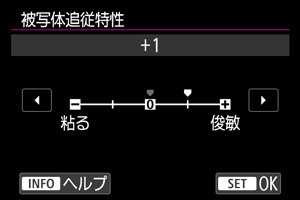
またはで調整値を選びます。
-
初期設定は[
]の薄い灰色で表示されます。 -
設定が終了したら
を押します。
-
/ボタンを押すと、手順1の状態に戻ります。
-
被写体追従特性
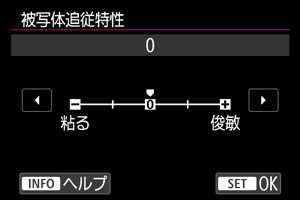
サーボAFで測距中に、障害物がAFフレームを横切ったときや、AFフレームが被写体から外れたときの、被写体に対する追従性の設定です。
-
0
標準的な設定です。動いている一般的な被写体に適しています。
-
粘る:–2/–1
障害物がAFフレームを横切ったときや、AFフレームが被写体から外れたときでも、できるだけ狙っている被写体にピントを合わせ続けようとします。–1よりも–2のほうが、狙っている被写体を長く捉え続けようとします。
その反面、意図しない被写体にピントが合ったときは、狙っている被写体に対するピント合わせに、やや時間がかかることがあります。
-
俊敏:+2/+1
AFフレームで捉えた、距離の異なる被写体に、次々にピントを合わせることができます。最も近い被写体にピントを合わせたいときにも有効です。+1よりも+2のほうが、異なる被写体にレスポンス良く反応します。
その反面、意図しない被写体にピントが合いやすくなります。
速度変化に対する追従性
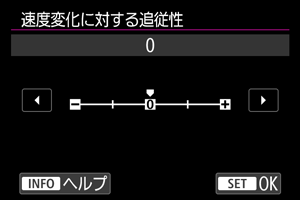
被写体が急に動き出したときや、急に止まったときなど、速さが瞬時に大きく変化したときの、被写体に対する追従性の設定です。
-
0
移動速度がほぼ一定の(速度変化が少ない)被写体に適しています。
-
–2/–1
移動速度がほぼ一定の(速度変化が少ない)被写体に適しています。0の設定でも被写体のわずかな動きや手前の障害物に影響されてピントが不安定なときに効果的です。
-
+2/+1
急な動き出し、急加速、急減速、急停止する被写体に適しています。被写体の速さが瞬時に大きく変化しても、狙っている被写体にピントを合わせ続けます。例として、向かってくる被写体の急な動き出しに対しては「後ピン」、急な停止に対しては「前ピン」になりにくくなります。+1よりも+2のほうが、大きい速度変化に追従することができます。
その反面、被写体のわずかな動きに影響されやすくなり、ピントが一時的に不安定になることがあります。
Case スペシャル
バドミントン,バレー等のネットがあるスポーツシーンで、ネット越しの被写体を追尾する場合など、ピントを合わせにくい被写体を撮影する際に利用できます。
-
[
:Case スペシャル]を選ぶ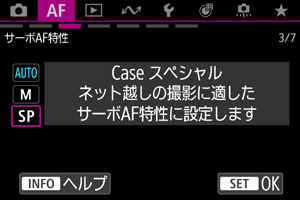
- を回して[SP]を選び、を押します。
- Case スペシャルに設定され、[SP]が青色で表示されます。
注意
- 通常の設定よりも奥側にピントが合うことがあります。特にネット越しでない被写体や小さな被写体に対して、被写体よりも奥にピントが合うことがあります。
- 被写体の手前にあるネットの密度が高い場合、被写体にピントを合わせにくいことがあります。
- レンズによって効果が異なることがあります。