2-2 サーボAF特性 Case マニュアル
[Case マニュアル]ではサーボAF特性の2つのパラメーター([被写体追従特性]と[速度変化に対する追従性])を手動で設定できます
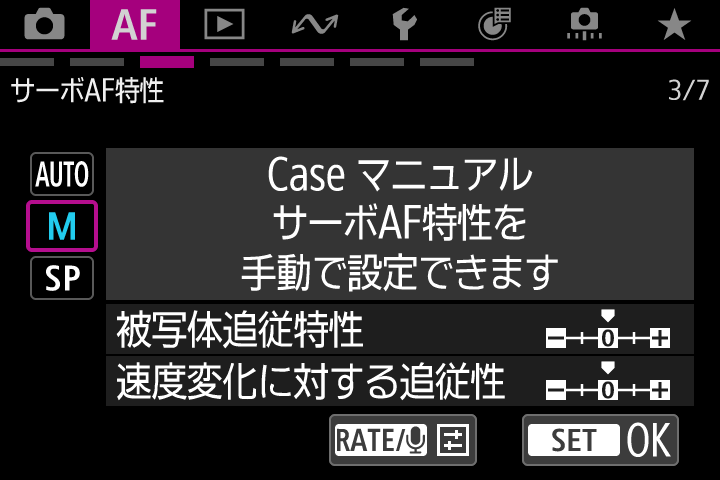
[被写体追従特性]と[速度変化に対する追従性]のパラメーターを手動で設定できるのが[Case マニュアル]です。
被写体追従特性

[被写体追従特性]は、サーボAFで障害物がAFフレームを横切ったときや、AFフレームが被写体から外れたときの被写体に対する追従性の設定です。
-
粘る(-1):被写体の手前に障害物が一瞬入り込むときや、被写体の動きが激しく、AFフレームから被写体が外れやすい場合に有効です。
–1よりも–2のほうが、狙っている被写体を長く捉え続けようとしますが、意図しない被写体にピントが合ったときは、狙っている被写体に対するピント合わせにやや時間がかかることがあります。
-
俊敏(+1):ユーザーのフレーミング動作に従って、AFフレームで捉えた被写体に素早くピントを合わせしたいときや、別の被写体へ次々と切り替えて撮影したいシーンに効果を発揮します。
+1よりも+2のほうが、異なる被写体にレスポンス良く反応します。その反面、意図しない被写体にピントが合いやすくなります。
粘る



手前に他の選手が被っても、奥の被写体に粘り続けてピントを合わせる
俊敏



AFフレームに重なった手前の被写体へと俊敏にピントを合わせ直します
速度変化に対する追従性

[速度変化に対する追従性]は、「被写体が急に動き出したとき」や「急に止まったとき」など、速さが瞬時に大きく変化したときの被写体に対する追従性の設定です。
-
-2/-1:移動速度がほぼ一定の(速度変化が少ない)被写体に適しています。
0の設定でも被写体のわずかな動きや手前の障害物に影響されてピントが不安定なときに効果的です。
-
+2/+1:急な動き出し、急加速、急減速、急停止する被写体に適しています。
被写体の速さが瞬時に大きく変化しても、狙っている被写体にピントを合わせ続けます。例として、向かってくる被写体の急な動き出しに対しては「後ピン」、急な停止に対しては「前ピン」になりにくくなります。+1よりも+2のほうが、大きい速度変化に追従することができます。
オンロードバイクのように急加速、急減速する被写体では[+2][+1]の設定が有効な場合があります。
[被写体追従特性]と[速度変化に対する追従性]の組み合わせ
[被写体追従特性]と[速度変化に対する追従性]のパラメーターの組み合わせで、従来機種の[Case 1]〜[Case 4]と同様のサーボAF特性にすることができます。
| 従来機種の設定 | 被写体追従特性 | 速度変化に対する追従性 | 設定 |
|---|---|---|---|
| Case 1 | 0 | 0 | 汎用性の高い設定 |
| Case 2 | -1 | 0 | 障害物が入るときや被写体がAFフレームから外れやすいとき |
| Case 3 | +1 | +1 | 急に現れた被写体に素早くピントを合わせたいとき |
| Case 4 | 0 | +1 | 被写体が急加速/急減速するとき |